|
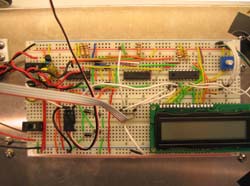
2008 Robotic Sonar Car The project for 2008 was a student designed and built their own robotic car platform used for several of the labs. Each student purchased the parts. See Parts List. The student wired their car following two schematics. See Schematic 1 and Schematic 2. The PIC16F88-I/P microcontroller was programmed in PicBasic Pro as sonar_car1.pbp. The PDF format may be found at sonar_car1.pdf. Eight robotic cars were successfully constructed by the students. One problem with the ultra-sonic range finder occurs when the unit emits an ultra-sonic pulse at a slight angle to a wall. The ultra-sonic pulse may bounce or reflect off the wall at a slight angle away from the range finder and not return back. The two bumper switches serve as a back-up sensor in the event of an erronous sonar reading. Photos:
|
|||||||||||||||||||||||